Haptyczna rękawica oparta na zjawisku jammingu (szkic)
Jakiś czas temu, stworzyliśmy i badaliśmy rękawicę dającą kinestetyczne sprzężenie zwrotne o ciekawej budowie. Rękwica jest w stanie blokować ruch palcy, w szerokim zakresie ich ruchu, a ma bardzo prostą mechaniczną budowę – składa się po prostu z elastycznych rurek wypełnionych sypkim materiałem (lub wielowarstowowym materiałem), przymocowanych do palcy dłoni. Cała magia wynika ze zjawiska jammingu.
Jamming
 Jamming, to zjawisko, gdzie materiał który normalnie zachowuje się jak płyn – to znaczy poddaje się naciskowi, można usztywnić, jeśli podda się go działaniu zewnęrznego ciśnienia. Dobrze ilustruje to film:
Jamming, to zjawisko, gdzie materiał który normalnie zachowuje się jak płyn – to znaczy poddaje się naciskowi, można usztywnić, jeśli podda się go działaniu zewnęrznego ciśnienia. Dobrze ilustruje to film:
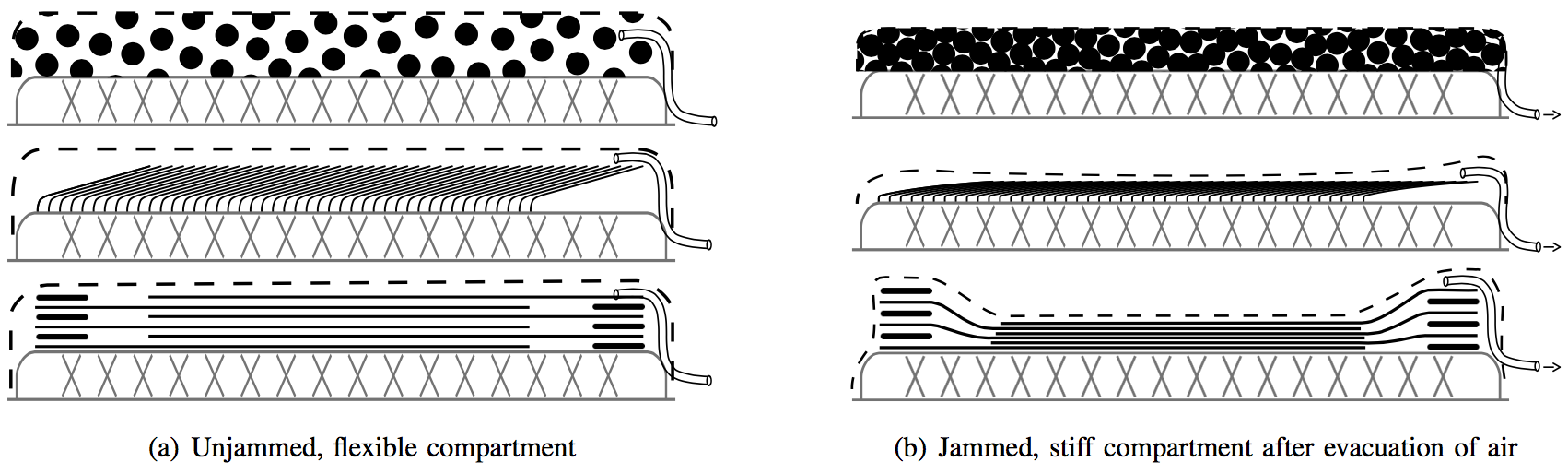
Jamming tubes
Urządzenie które skonstruowaliśmy, wprost korzysta z jammingu. Możemy kontrolować sztywność rurek, zmieniając podciśnienie jakie w nich panuje. W ten sposób, gdy np. ktoś łapie wirtualne jabłko, gdy zgina palce rurki usztywniają się, uniemożliwiając dalszy ruch.
Generalnie, musimy mierzyć ugięcie palcy, co robimy za pomocą ogólnie dostępnych czujników ugięcia (flex-sensor), które kalibrujemy.
Rurki kontrolujemy systemem ze sprzężeniem zwrotnym, gdzie ustalamy na określonym poziomie ciśnienie za pomocą mikro-pompki próżniowej. Określone ciśnienie przekłada się na określoną sztywność elmentu.
Aktualnie rękawica lepiej wygląda i ma bardziej kontolowalne parametry, ponieważ robimy ją na wyciętej CNC formie, wygląda to obecnie tak:

Wyniki z badaniami ukażą się niedługo w piśmie Journal of Intelligent & Robotic Systems.