Materiały do laboratorium podstaw robotyki
Laboratorium trwa 15 godzin i jest realizowane przez pół semestru. W czasie laboratorium poznacie w jaki sposób przejść od wyszukiwania dokumentacji (datasheetów) manipulatorów do ich modelowania i obliczeń kinematyki prostej i odwrotnej.
Celem laboratorium jest przybliżyć, jak takie modelowanie można wykonań w praktyce i przygotować was do dalszych działań z robotyką w szególności do pracy w systemie ROS (Robot Operating System) i MATLABie.
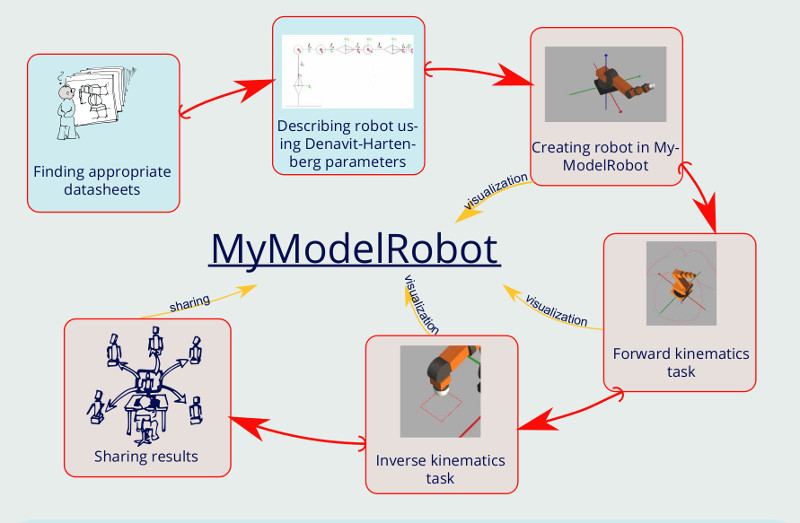
Kolejne zadania w trakcie laboratorium przedstawiłem na schemacie, są to:
- Wyszukanie robota odpowiedniego do zadania. Roboty posegregowane na kategorie można np. znaleźć tu: Industrial Robot Applications
- Skonstruowanie wizualnego modelu robota w MyModelRobot, po konwersji tabeli D-H na bazowy URDF
- Praca w MATLABie:
- Zagadnienie kinematyki prostej
- Zagadnienie kinematyki odwrotnej
- Opis robota, wykonanych zadań i sprawozdanie
Materiały
Większość materiałów do laboratorium jest dostępna poprzez linki na tym blogu. Nagrałem też filmiki instruktażowe na Youtube.
Instrukcja do MyModelRobot: https://www.youtube.com/watch?v=W3Ggv0Xdbuw
Instrukcja do tworzenia URDF: http://gentle.pl/2017/05/04/budowanie-robota-urdf.html
Instrukcja do rozwiązywania zagadnienia kinematyki prostej i odwrotnej za pomocą MATLABA i RoboticsToobox: https://docs.google.com/document/pub?id=1iEk2RW_fXzR09AjpgYyyZFcKCF6K_6p-GiWEsUvbTV4
Narzędzia
MyModelRobot https://mymodelrobot.appspot.com
Konwerter tabeli Denavita-Hartenberga do URDF http://adohaha.github.io/DH2URDF
Marker HIRO http://mymodelrobot.appspot.com/data/HIRO.jpg
{kind=link}
Literatura i materiały pomocnicze
Szczególnie polecam książkę Peter’a Corke’a, autora RoboticsToolbox. Opisane są w niej krok po kroku zadania kinematyki prostej i odwrotnej, jak też podstawy teoretyczne.
Książka “Robotics, Vision & Control - Peter Corke.” 2011. 3 Nov. 2012
Oraz jego kursy online (MOOC): https://www.mooc-list.com/instructor/peter-corke
Sprawozdanie
Podstawą oceny z laboratorium jest sprawozdanie, także musi się w nim znaleść opis wszystkiego co zostało zrobione.
- Muszą pojawić się modele robota: URDF w osobnym pliku ale także screen robota (jako JPG ew PNG) z mymodelrobot.
- Tabela D-H i odpowiadający jej rysunek.
- Opis samego robota, tj. do czego jest przeznaczony, jakie ma parametry (precyzja, prędkość, udźwig itd)
- W przypadku kinematyki prostej:
- wykresy zadawanych położeń złączowych, wynikające z nich trajektorie (w programie MATLAB i Mymodelrobot).
- Także osobny plik csv z trajektorią.
- W przypadku kinematyki odwrotnej:
- wykres zadawanej trajektorii kartezjańskiej,
- wykres wynikowej trajektorii kartezjańskiej (teoretycznie powinny być identyczne)
- screen trejektorii z programu mymymodelrobot.
Opis: w sprawozdaniu musi się pojawić opis kroków które zrobiliście, tak jak m plik (też załączony) jest dla komputera, tak czytający sprawozdanie musi zrozumieć ciąg kroków, które zostały zrobione aby otrzymać wynik. Załóżcie, że opisujecie swoją pracę przyszłemu pracodawcy. Wszystkie pliki proszę o przesłanie mailem, w tytule [sprawozdanie lab. podstawy robotyki] w treści email: imiona nazwiska i numery indeksów w załączniku: sprawodzanie jako pdf + zip z m plikami, urdf
Ocena sprawozdania
Po pierwszych trzech zajęciach, przynosicie połowę sprawozdania – model robota i kinematykę prostą. Służy to sprzężeniu zwrotnemu, żebyście finalną wersję oddali jak najlepszą.
Na koniec, ocena jest związana z wykonanymi zadaniami jak i jakością sprawozdania. Dobrze napisane sprawozdanie dostanie poniższe oceny przy wykonanych zadaniach:
Ocena 3 Kinematyka prosta w MyModelRobot i Robotics Toolbox. Robot wykonuje ten sam ruch w obu programach, co widać na screenach i wykresach. Może to być prosty ruch w jednym lub dwóch złączach
Ocena 3.5 Kinematyka odwrotna, robot kreśli w obu programach linię prostą
Ocena 4 Kinematyka odwrotna, prosty kształt ( kwadrat, trójkąt)
Ocena 4.5 Kinematyka odwrotna, zaawansowany kształt (3D lub krzywa parametryczna, taka jak Batman Curve)
5 Dodatkowo, kinematyka prędkości, jakie wartości złączowe ma robot przy kreśleniu określonego kształtu. Ew. inne zadanie po konsultacji z prowadzącym.
5+ Wykresy momentów dla uproszczonego modelu dynamiki robota (złącza jako cylindry, brak oporu statycznego w złączach, brak przekładni)
Sugeruję robić fragmenty sprawozdania po kolejnych zajęciach. Na oddanie sprawozdania jest tydzień od ostatnich zajęć, po tym czasie każdy dzień spóźnienia to 0.5 oceny w dół.
Feedback
Jeśli coś jest nie tak, są jakieś niezrozumiałe kwestie ew. chcesz coś skomentować, możesz to zrobić poprzez email igor.zubrycki@p.lodz.pl
lub poprzez anonimowy formularz na google drive
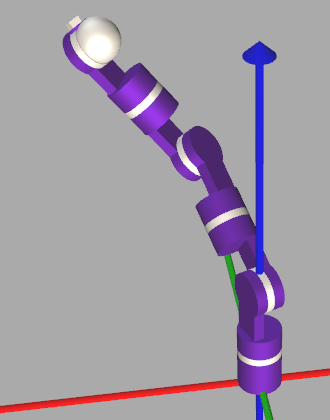
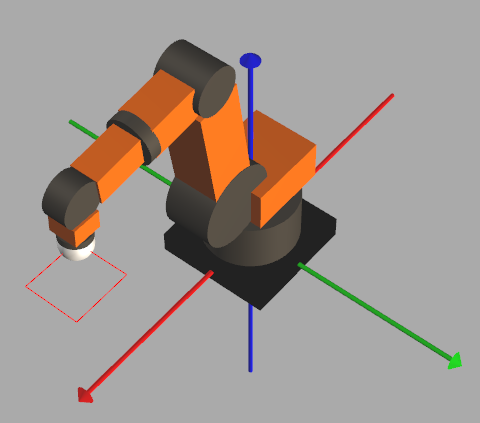
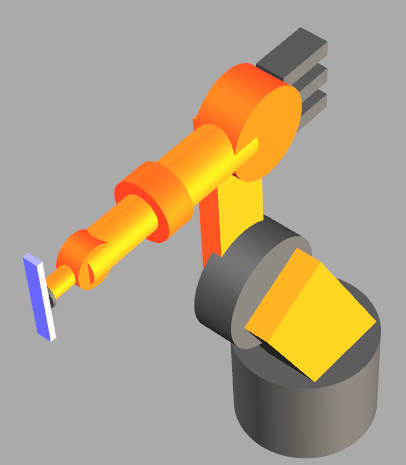
Przykładowe modele robotów powstałe na laboratorium